飞控系统概述
JX系列飞控采用先进的硬件架构和算法设计,为各类无人机提供稳定、可靠的飞行控制解决方案。支持多旋翼、固定翼、垂直起降等多种机型,具备高度的灵活性和可扩展性。

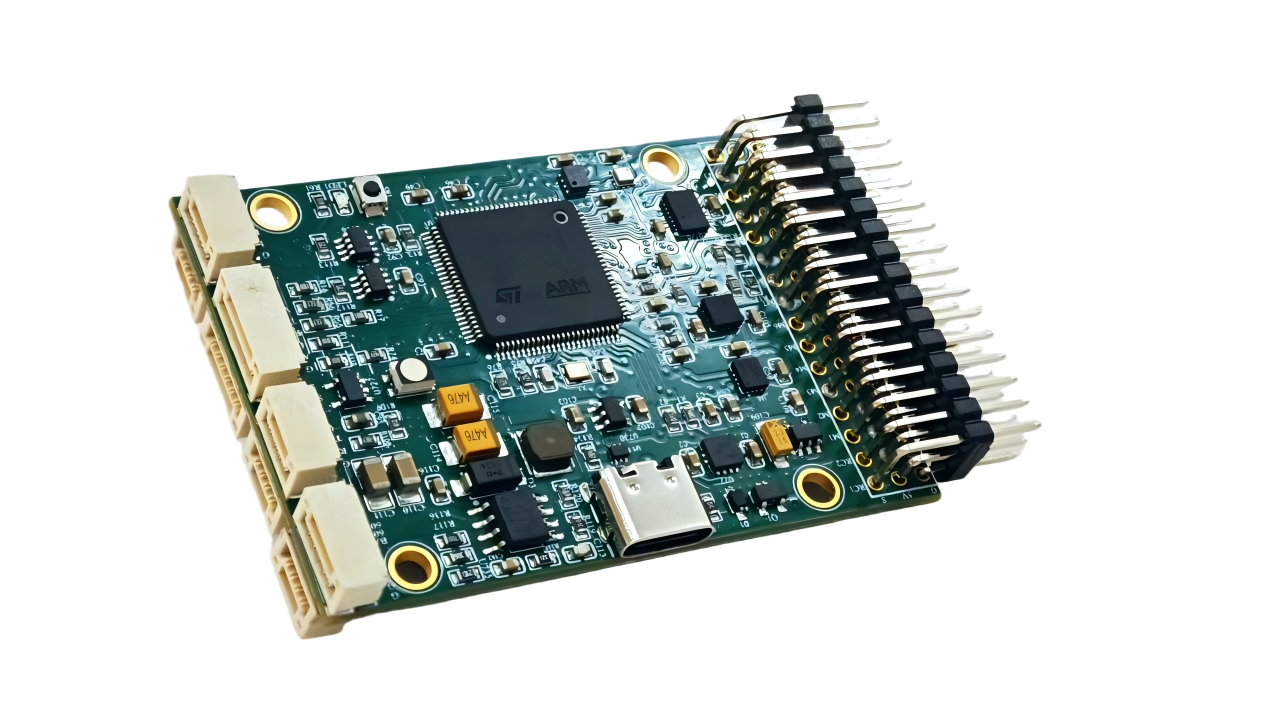
JX01飞控
JX飞塔
JX系列飞控采用先进的硬件架构和算法设计,为各类无人机提供稳定、可靠的飞行控制解决方案。支持多旋翼、固定翼、垂直起降等多种机型,具备高度的灵活性和可扩展性。
支持GPS/GLONASS/北斗多模卫星定位,结合RTK差分技术,实现厘米级定位精度。
采用先进的飞控算法,实现自动稳定、智能避障、路径规划等功能。
搭载STM32H743处理器,处理速度快,响应迅速,支持复杂任务执行。
支持多种外设接入,可根据需求进行功能扩展和定制开发。
关键传感器采用双冗余设计,提高系统可靠性和安全性。
支持多旋翼、固定翼、垂直起降等多种无人机机型。
JX系列飞控系统适用于多种无人机应用场景:
